
Starting robotics - Driving scuttle with ROS - Gazebo simulation
After getting familiar with ROS, the next step was to get the navigation stack working in Gazebo for the SCUTTLE robot. Fortunately, the SCUTTLE developers had already created a number of ROS packages containing the scuttle model, the startup scripts and the driver code. All the bits you need to drive SCUTTLE around using ROS.
The first challenge is to drive the SCUTTLE model around in Gazebo using the keyboard. This was easily achieved using Gazebo and RViz using WSL2, but it was a bit slow.
The next challenge was to make the virtual SCUTTLE drive to a specific point using a custom ROS node. While doing the ROS for beginners I course I wrote some code to do a move-to-goal for the turtlesim virtual robot. The code was updated and then used for the SCUTTLE robot. The result is a robot that moves to a goal, mission accomplished!
The final challenge, for now at least, is to get the navigation stack to work for SCUTTLE. In order to do so a few new packages needed to be created. The packages I created are
- scuttle_slam - Contains the configurations and launch files for running gmapping SLAM using the SCUTTLE LIDAR.
- scuttle_navigation - Contains the configuration for working with the navigation stack.
- scuttle_gazebo - Contains a number of Gazebo worlds for testing our virtual SCUTTLE.
The scuttle_slam and scuttle_navigation packages are based on the similar packages for
turtlebot3 with adjustments so that the configuration
matches SCUTTLE's performance.
For navigation in ROS1, you need two different types of path planners and a map for each planner. The first type is the global planner, which uses a map to determine the fastest path from the current location to the goal location. The second type, called the local planner, navigates the robot to the goal by trying to follow the path created by the global planner. The path followed by the local planner may deviate from the global path due to previously unknown obstacles and limitations of the robot, e.g. the ability to follow a turn. The map for each planner is known as a costmap which indicates which part of the surroundings are occupied by obstacles and which parts can be navigated. After configuring the planners and the costmaps, the navigation worked. I could use RViz to set a point on the map and the virtual SCUTTLE would navigate to that location automatically. Success!
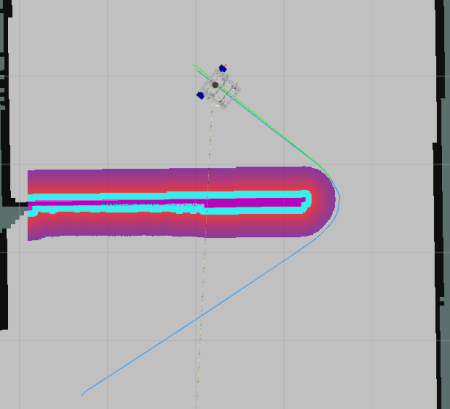
Now, not everything was fine. The first issue is some weird behaviour with the DWA local planner. Once the robot is moving the local planner mostly does a good job. However, when starting a path it takes a while for the local planner to pick up the global path. In fact, the DWA planner doesn't seem to accept the global plan until after a rotate recovery has taken place. So far, I haven't found a solution to this problem.
The second issue is that, in some cases, the navigation stack fails to find a path out of a narrow hallway or though a narrow door. In general, this happens when exploring a location, e.g. using the explore_lite package. It seems that the algorithm can't find a turn that will rotate the robot in the available space, even though scuttle is able to perform in-place rotations. At the start of a navigation exercise, in-place rotations are gladly used. However once the robot is on the move, the algorithm doesn't seem to apply in-place rotations anymore.
Finally, you have to keep in mind that the default planners for ROS are path planners. This means that they plan a path from the start to the destination. These paths, however, only describe the direction a robot should take at a given location. They don't describe velocity or acceleration. Only describing the direction can generate paths with abrupt turns that force the robot to slow down significantly. Using a trajectory planner, which at least prescribes velocities, makes for a smoother experience for robot and cargo.
Edits
- October 26th 2022: Added the
Gazebotag.